消毒豹梯控SOP
消毒豹梯控SOP
消毒豹梯控一期整体情况:
1. 一期仅支持单梯情况(单机单梯),不支持多梯,不支持多机
2. 系统级充电任务不可用,由OPK管理
3. 非计划消毒任务不能自动结束
前置环境勘测&电梯改装
前置环境勘测
- 电梯一定为“有实体按键式”电梯。
- 勘测梯控板与梯控是否适配
- 轿箱顶是否有可使用的平衡开关
梯控适配条件(Via通佑) 轿厢按钮以及开门按钮必须要求机械按压式 刷卡需满足一下任意一种: 1. 开关量接线控制 2. 有刷卡器控制开关 3. 通讯协议式的需要现场勘察(或者远程视屏,可解决一部分)
物料准备
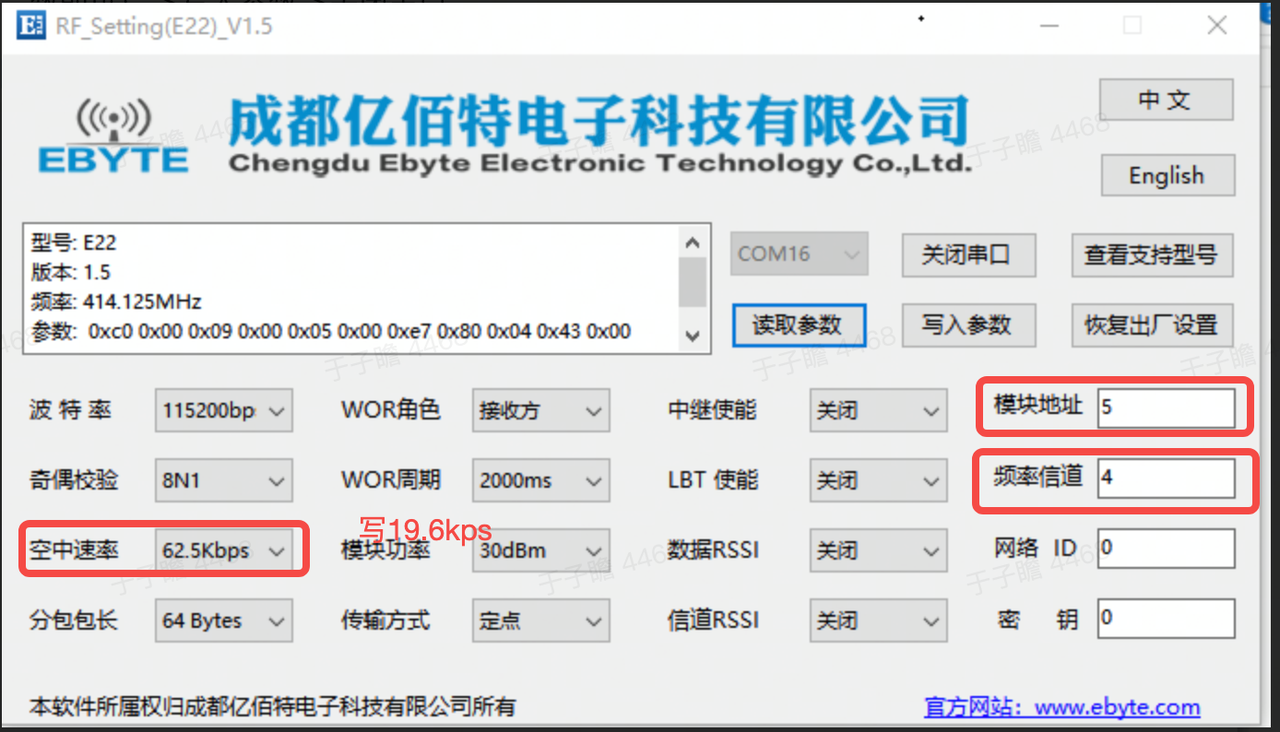
轿箱盒子(梯控板)配置
- 拔起Lora模块顶部第一个黄色盖帽(下图圆圈处)
- 串口(下图红框),外接USB线,连接PC端

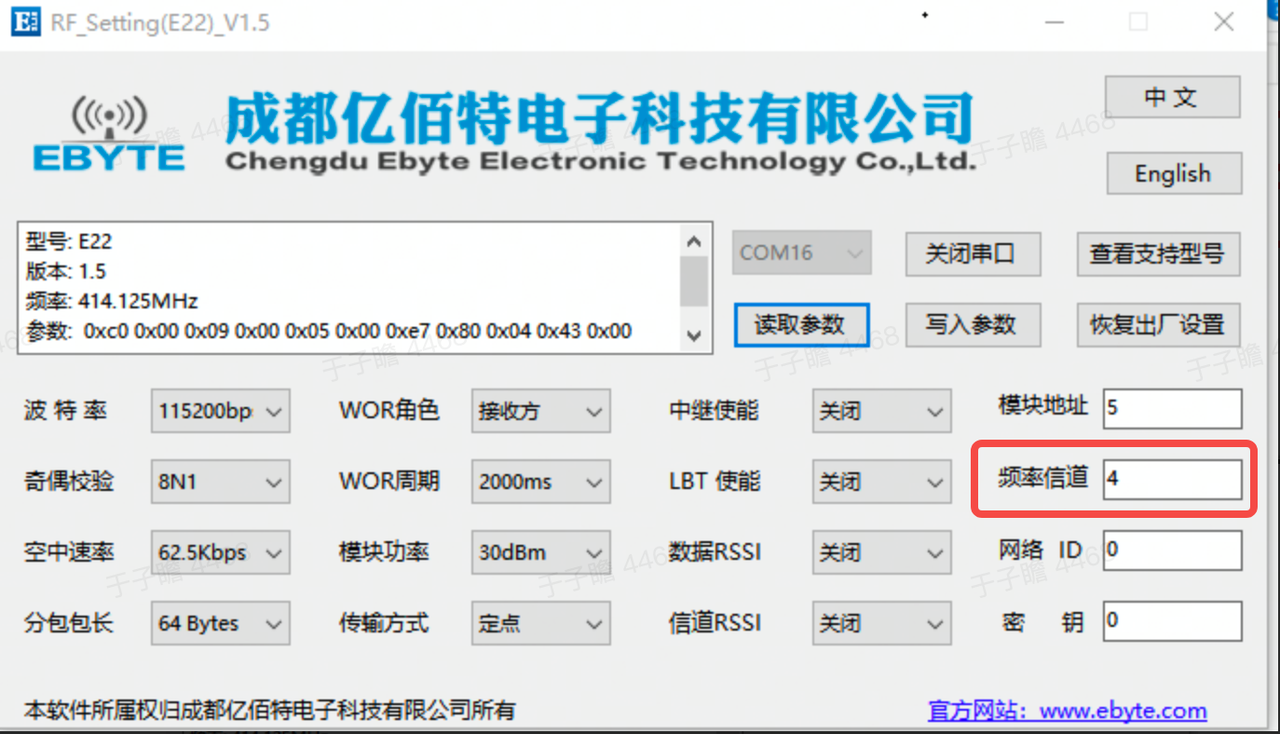
- 打开配置软件:打开串口->读取参数->配置参数(模块地址为机器编号,其他按照下图中设置参数即可)->写入参数->关闭串口;
ConfigureTool_EBYTE_E22-Setting_v1.5.exe
电梯改装
目前找第三方团队完成梯控改装,销售如果有梯控部署需求,请提前三天联系售前交付团队@闫琦琦 ,进行安排。
消毒机器人实地部署(猎户部署)
设备激活
小程序激活
通过微信扫描屏幕二维码进行设备激活


PC端激活
登陆jiedai后台(https://jiedai.ainirobot.com/web/portal/#/)–设置—企业信息–手动绑定–输入SN后六位+机器人绑定码,完成激活。

创建地图
- 对于需要执行消毒任务的楼层需要全方位建图,不能有死角。
扫图
电梯扫图
- 站在机器人背后遥控建图或平稳推动建图。
- 要在电梯内无人的时候进行扫图,电梯内扫图全覆盖,不能用死角。
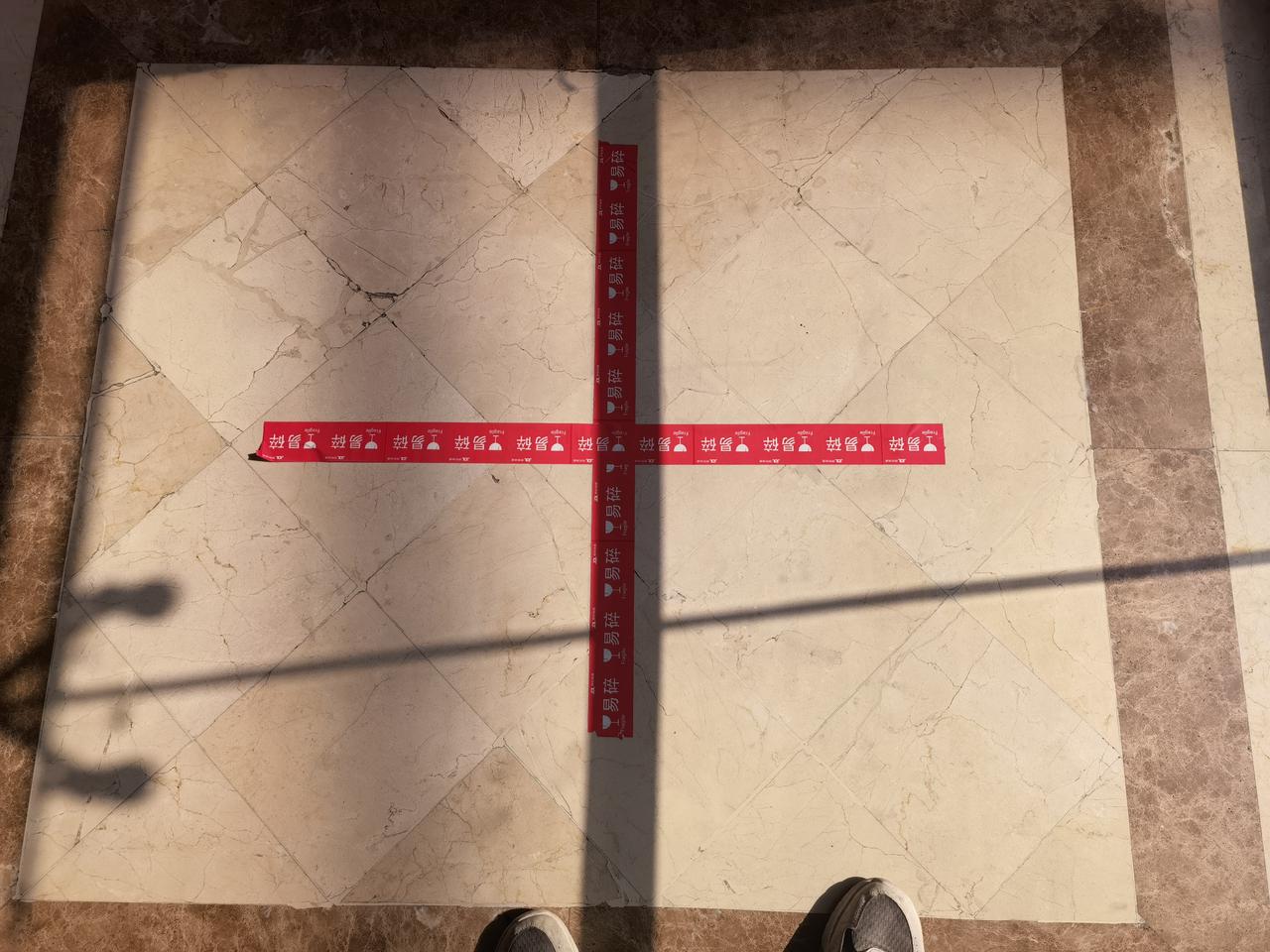
- 每层建图要从电梯中心开始扫图。扫图时,最好使用地贴标记出电梯中心位置(保证每一层电梯位置和朝向一致),待建图完成后,再将标记地贴清除。
楼层扫图
- 站在机器人背后遥控建图或平稳推动建图
- 每层创建的地图确保机器人要到达的所有区域被扫描
设点
特殊点位设置
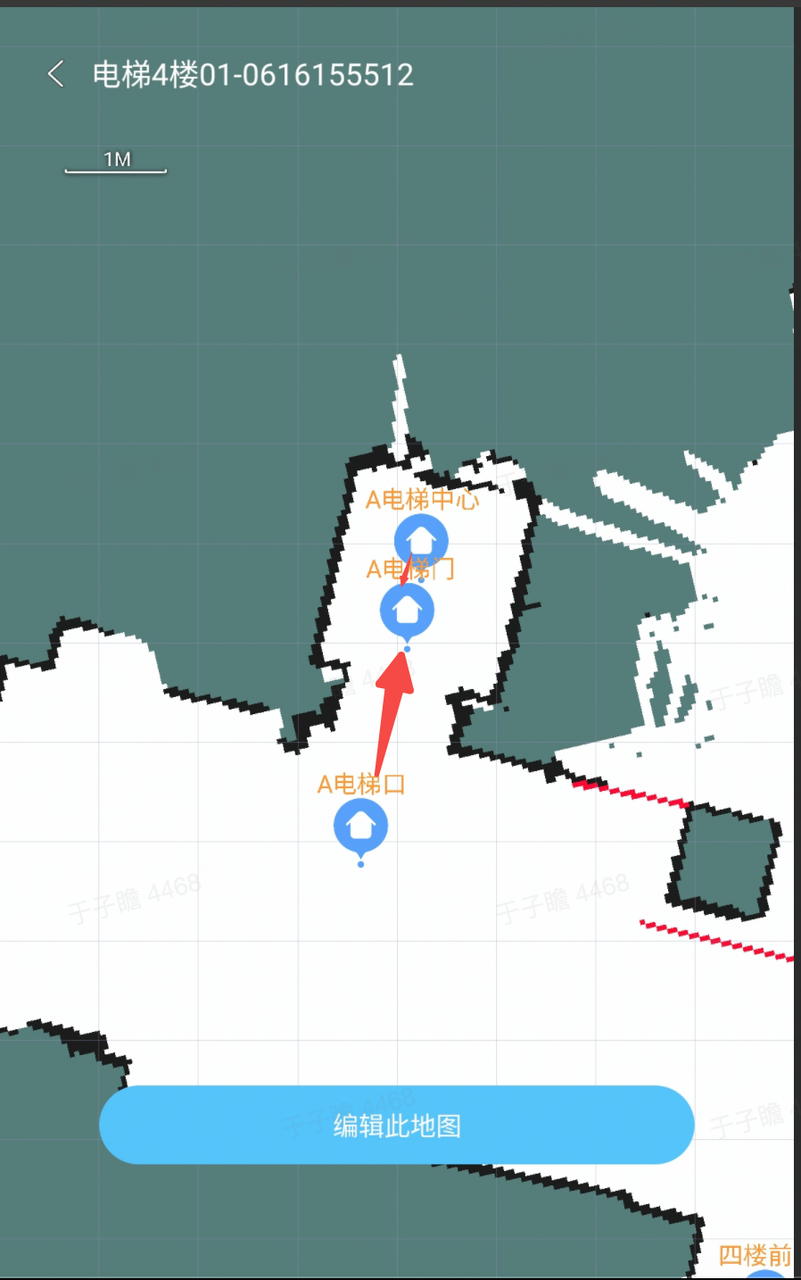
待机点、充电桩、电梯口、电梯门、电梯中心为特殊点位,必须设置
- 设置电梯中心时,点位朝向电梯门
- 设置电梯口时,点位朝向电梯门
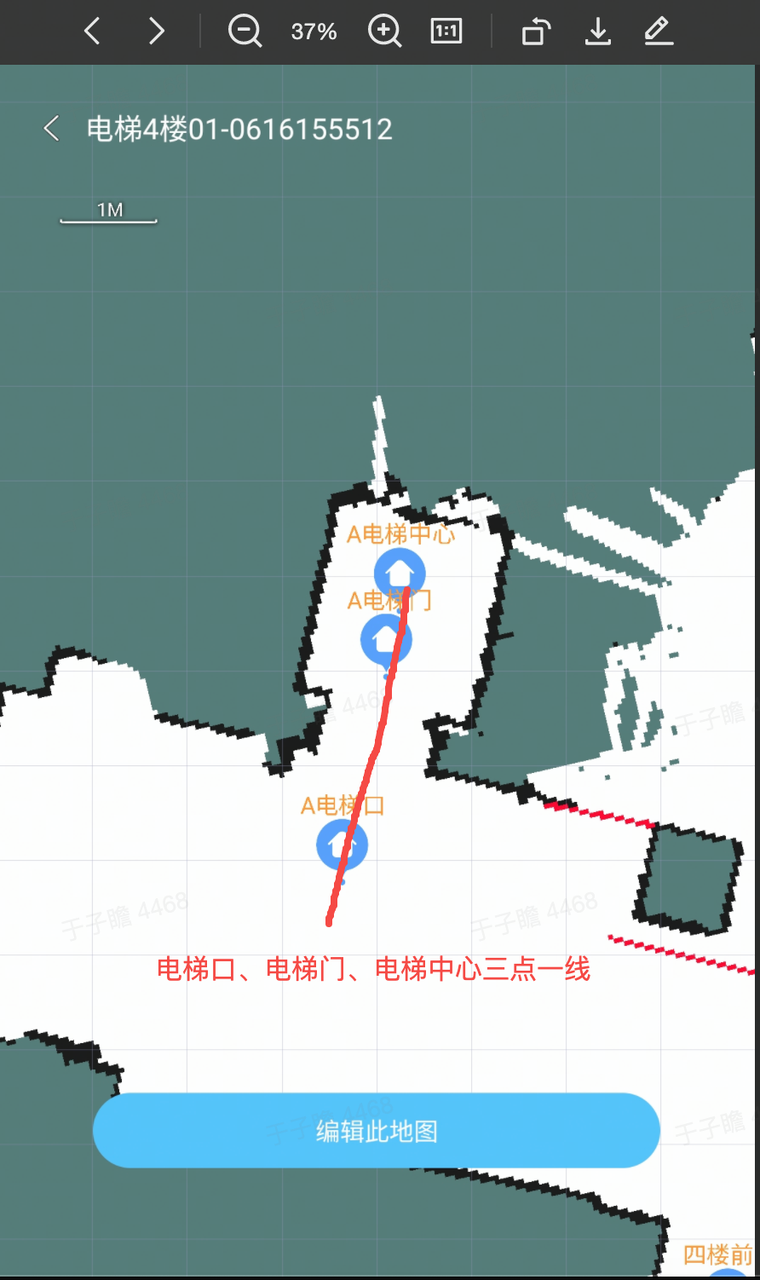
- 电梯口、电梯门、电梯中心三点点位设置在一条直线上
- “电梯中心”、“电梯口”两个点位要距离电梯门留有至少供1人进出电梯的距离(若电梯较小按照实际情况设置即可)
- 若走廊和电梯口有一定的坡度,设置“电梯口”点位时,尽量避免斜坡,但前提是保证“电梯口”处于电梯门前方中间位置
- 若电梯为玻璃材质的观光梯,扫描前需要:
- 在距离电梯内部地面23.5cm高度处贴上不透明胶带等类似物品,标记为障碍物,待整个建图完成后恢复
- 充电桩附近区域必须扫全!!!
- 充电桩位姿一定要正!!!
- 充电桩周围环境不要有变化!!!


普通点位设置
将机器人要停的消毒点位设置好,点击“新增地点”–输入点位名称,完成点位设置
设置位置点时,请注意点位的朝向。
修改地图
擦除躁点
- 擦除机器人运行范围内的躁点,尤其是走廊、电梯内部、充电桩附近区域噪点:噪点可能由于临时障碍物造成,务必擦除!!(稍后补充一个擦除噪点的视频)
- 建图时,若将电梯门扫到地图内,需要将电梯门擦除。
绘制禁行线
- 确保机器人行走有风险的区域要贴
- 楼梯口
- 台阶
- 走廊尽头的落地窗
- 玻璃门
- 悬空的物品:高脚椅子、桌子、墙壁等
- 若电梯为玻璃材质的观光梯,沿着建图时贴着的胶带区域画一圈禁行线
- 不需要画禁行线区域:
- 若电梯为非玻璃材质,电梯内部不需要画禁行线
- 实体墙面严禁⚠️画禁行线
- 固定障碍物且雷达可以看到的不需要画:如四方的桌子等
上传地图
- 点击保存后,确保地图已经上传成功到云端
- 若云端无已创建的地图,手动上传一次直到成功
点位映射(在多机情况下常用,非必设)
如果存在多机共用一张地图时,特殊点位不能共用,可以通过设置特殊点位映射的方式,让机器能够同地图调度使用
楼层设置
添加楼层



楼层映射关系
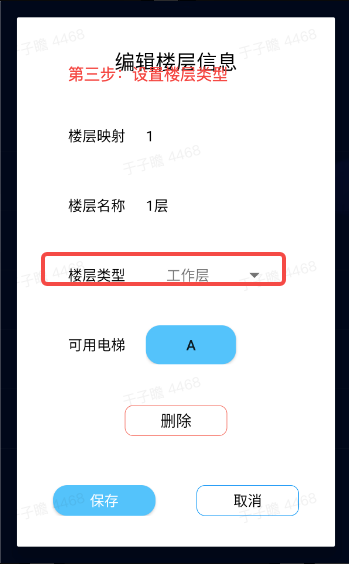
在添加地图页点击“使用地图”–设置楼层映射—设置楼层名称—设置楼层类型
此功能主要针对楼层名称和实际所在楼层不一致的情况,如3层为M层或者5层、1层为L层等情况。
注意⚠️:
主楼层必须设置,主楼层有且只能设置一个,机器只去主楼层执行充电任务。


| 楼层层数 | 电梯楼层按键 |
| 1层 | 大堂 |
| 2层 | 2 |
| 3层 | M |
| 4层 | 5 |
| 5层 | 6 |
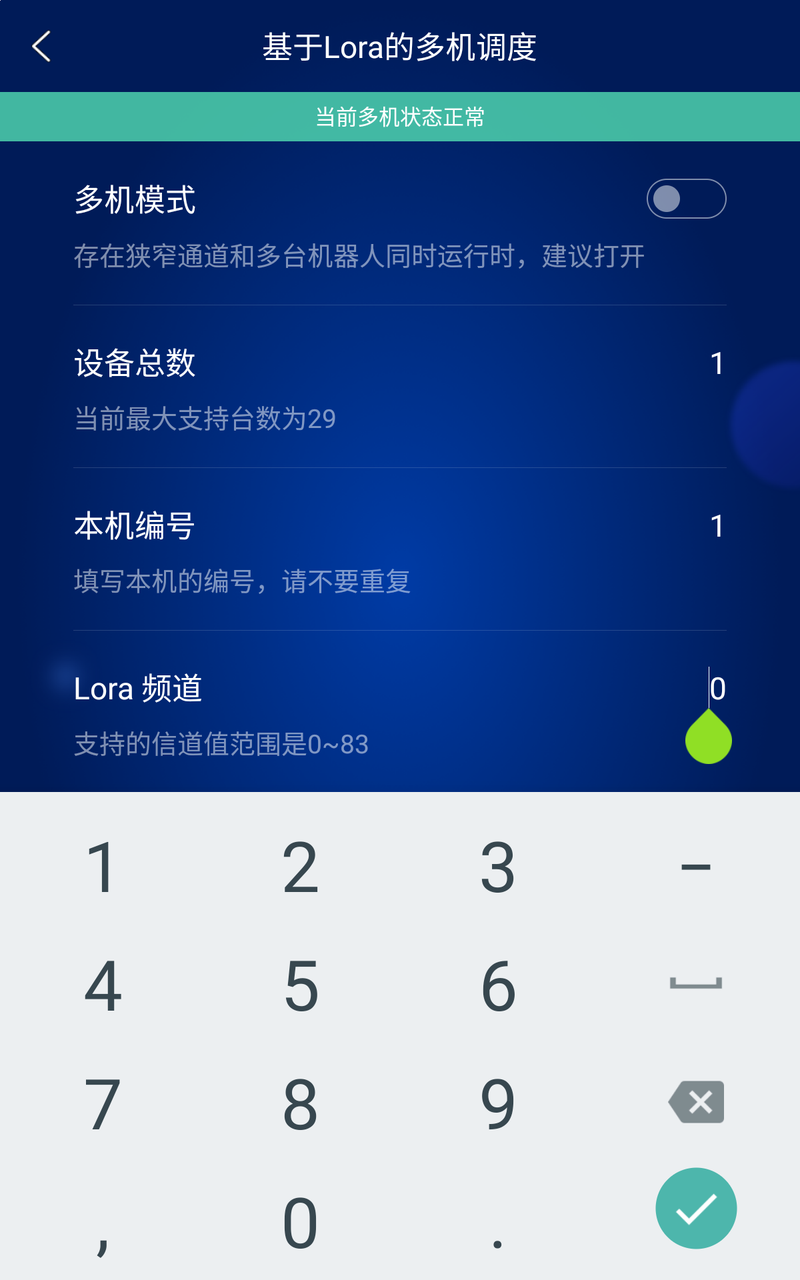
Lora通信设置
机器人端信道与梯控盒子的信道设置保持一致,保证机器人能够正常呼梯。
绘制巡线
楼层创建好地图后,登陆jiedai后台进行巡线绘制

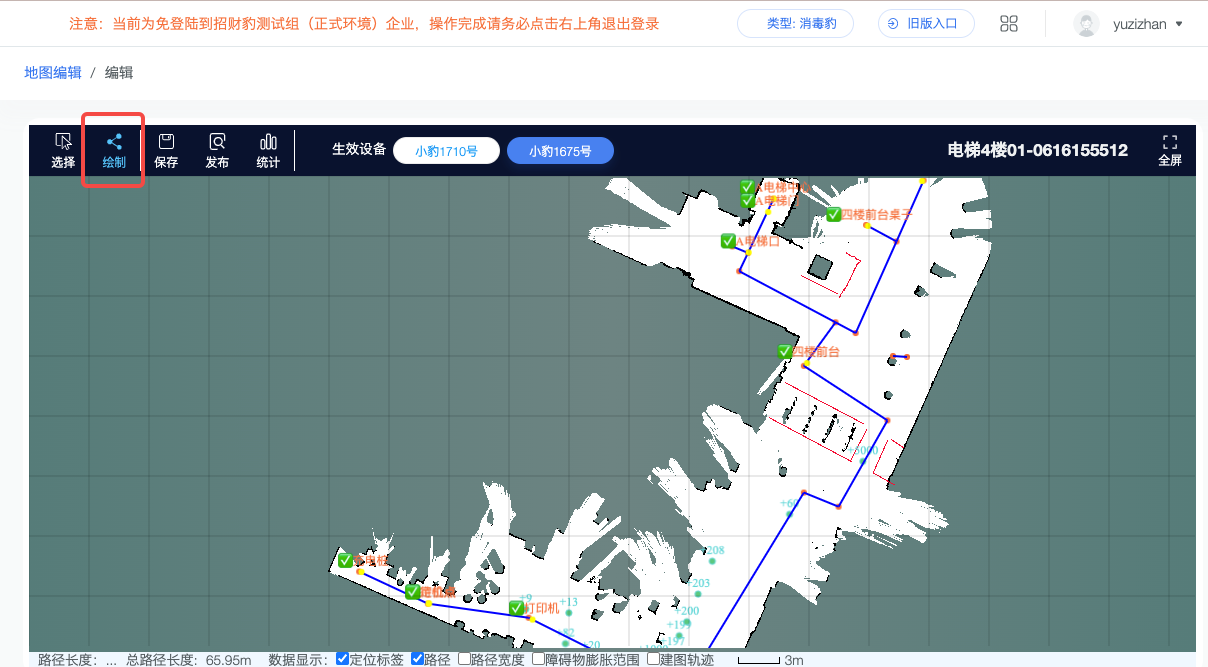
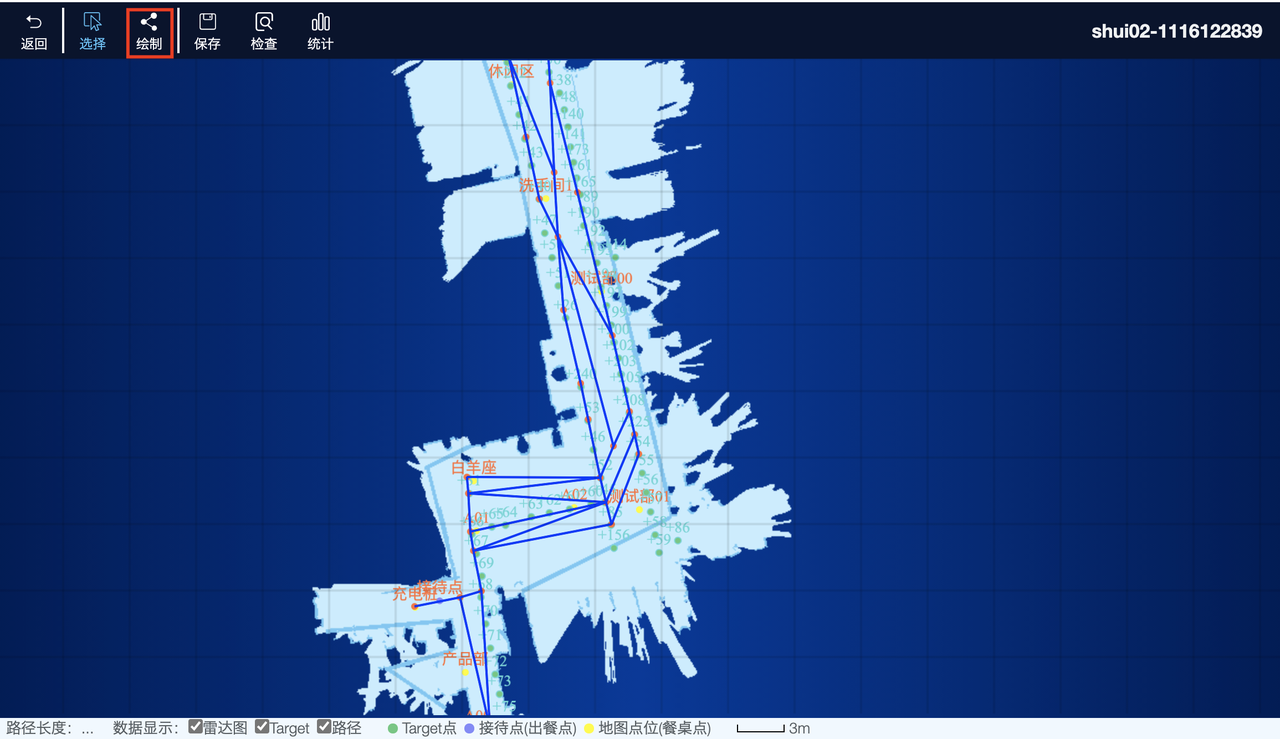
选择地图后,点击“绘制”功能,即可绘制巡线
绘制完毕需要点击“检查”,检查路径是否合格(路径不能独立存在,不能交叉)
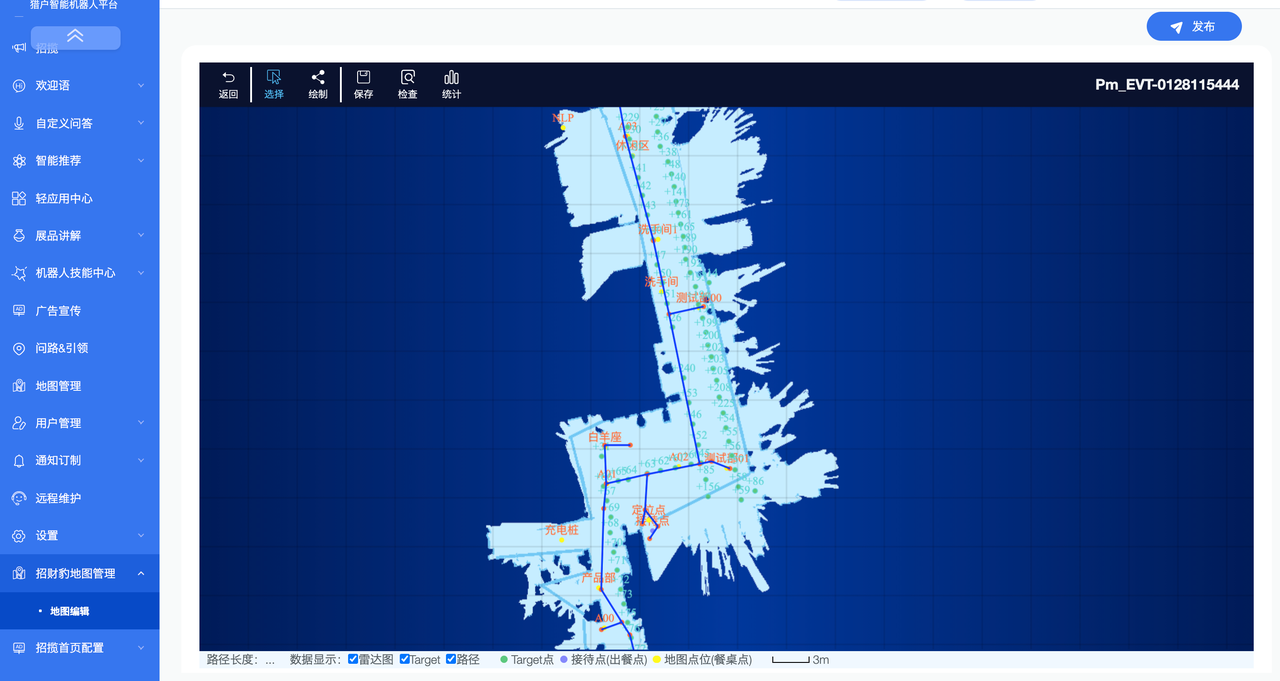
巡线绘制后,点击“发布”,可以弹窗选择当前在线的机器人进行发布
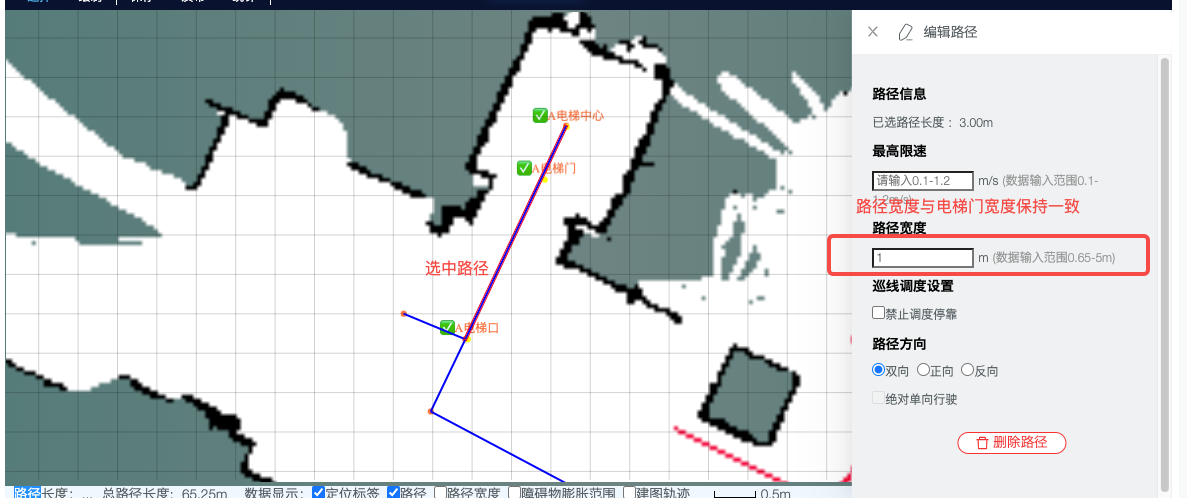
特别注意⚠️:
电梯口外侧多画一条分支,作为机器人的等待区
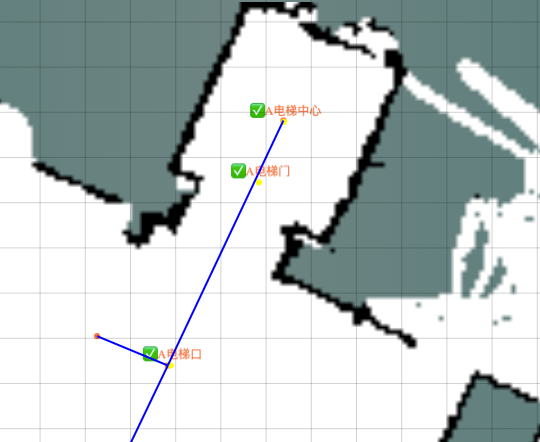
电梯处巡线路径宽度设置为与电梯门保持一致
注意事项
- 梯控一期仅支持单梯梯控
- 主楼层必须设置,并且自动回充只会到主楼层回充
- 系统级定时回充业务不生效,纯OPK管理