适合机器运行的物理环境
机器人部分硬件及算法原理介绍
1.SLAM原理:
- SLAM(Simultaneous Localization and Mapping),中文译为同步定位与地图构建,它指的是:机器人从未知环境的未知地点出发,在运动过程中通过重复观测到的环境特征定位自身位置和姿态,再根据自身位置构建周围环境的增量式地图,从而达到同时定位和地图构建的目的。
- 如下图,通俗的来讲,SLAM回答两个问题:“我在哪儿?”“我周围是什么?”,就如同人到了一个陌生环境中一样,SLAM试图要解决的就是恢复出观察者自身和周围环境的相对空间关系,“我在哪儿”对应的就是定位问题,而“我周围是什么”对应的就是建图问题,给出周围环境的一个描述。回答了这两个问题,其实就完成了对自身和周边环境的空间认知。有了这个基础,就可以进行路径规划去达要去的目的地,在此过程中还需要及时的检测躲避遇到的障碍物,保证运行安全。
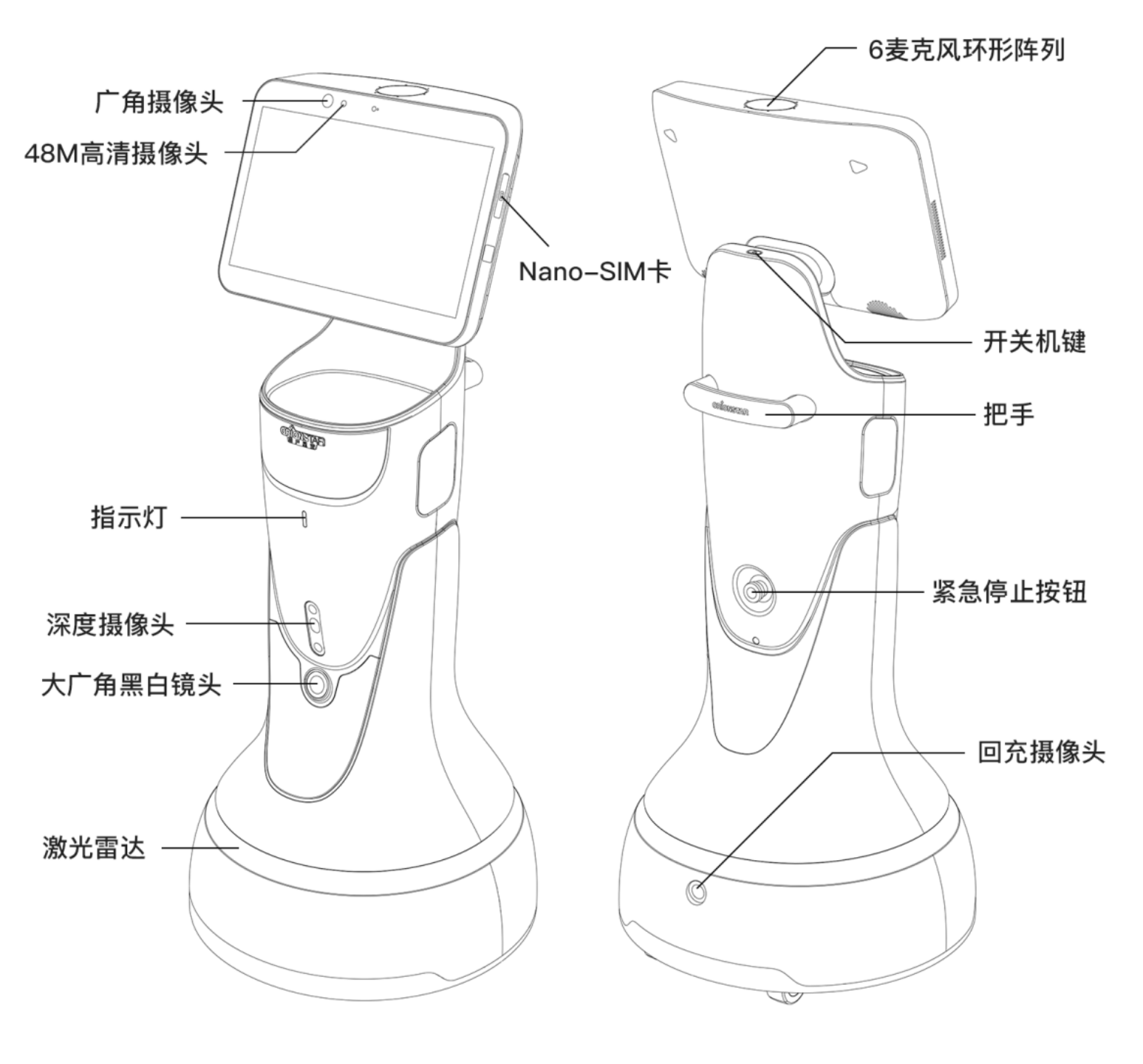
2.部分硬件介绍
- 豹小秘Mini 室内导航系统采用了多传感器融合,包括低成本激光雷达,RGBD相机,单目相机,红外传感器,温度湿度检测,强大的多传感器融合算法(6轴IMU+轮式里程计、单线激光、Global ShutterMono),配以真视觉系统的导入,采用高性能图像分割、检测分类模型、抗光照特征检测及匹配算法、高精度视觉地图、高成功率视觉重定位模块为豹小秘Mini导航能力的稳定性起到了巨大的推动作用。
- RGBD深度摄像头:深度传感器,测量距离,获取深度信息,范围1-5米较精确,用于避障。
- 激光雷达:豹小秘Mini的底盘处装有激光雷达,雷达精度可达5米以上,实时比对实际环境中激光数据图是否跟地图中的吻合,让机器人知道自己在哪里走到了哪里
- 回充IR原理: 向周围发射红外光,当机器人走到充电桩附近,充电桩就会发出响应信号,慢慢靠近完成充电接入,该技术原理主要用于机器人寻找充电桩,完成自动回充。
- IMU: 加速度传感器;考虑机器人运动时的惯性以及记录运动姿态(朝向哪个方向)
- 里程计:记录机器轮子的行进里程
机器人运行环境要求
机器人在开机激活需要地图,创建地图的质量直接影响机器人的运行状态。
1.为什么要建图?
- 机器在使用前需要进行学习,构建“原始地图”,才能根据上述的SLAM等原理找到自己目前处于的位置,实现安全稳定的导航效果。
2.创建地图需要注意的事项
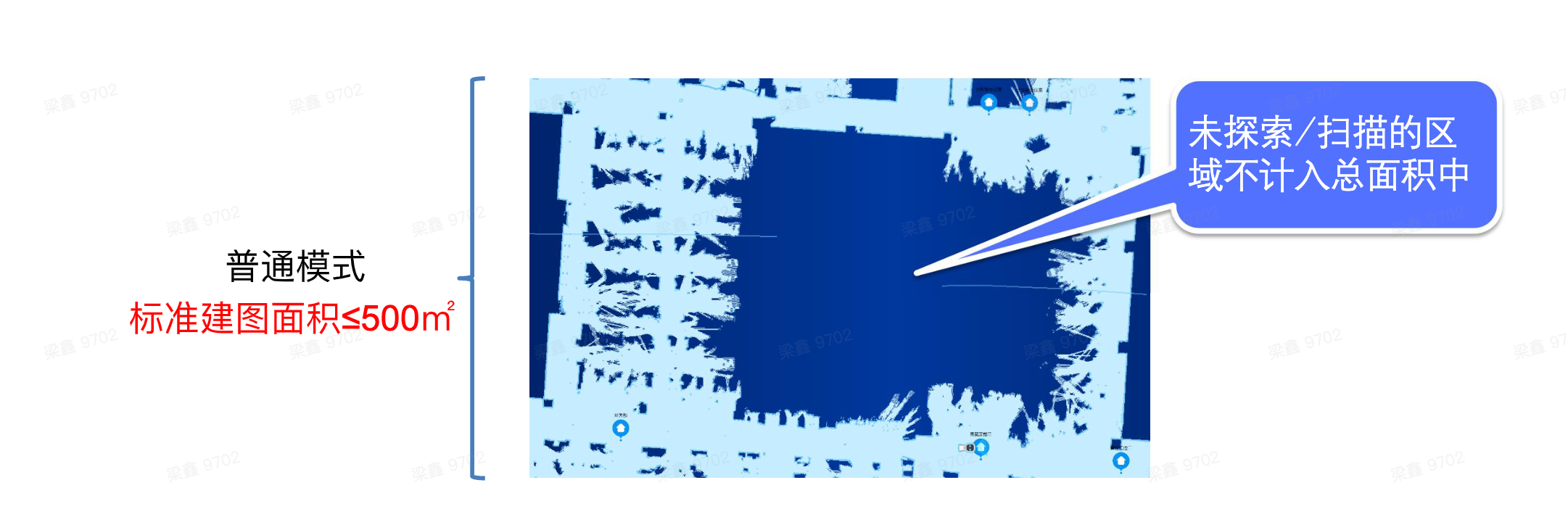
- 机器人平稳运行的面积?
豹小秘mini机器人可平稳运行的建图面积为500㎡内,建图如果超过500㎡,可能会导致建图失败。
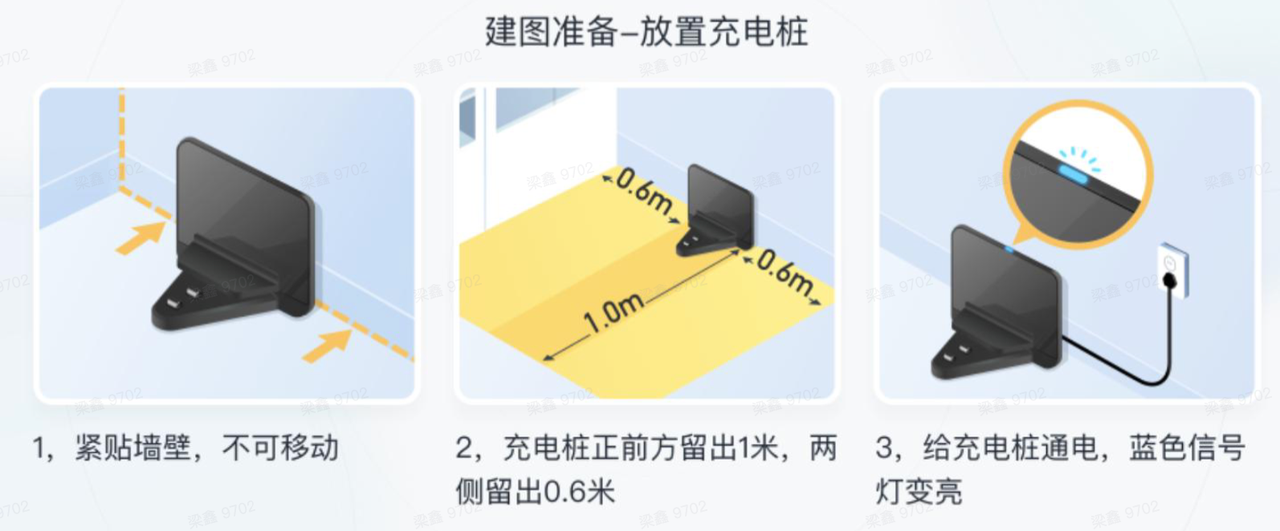
- 如何选择充电方式?线充or座充?
如果满足以下条件,推荐用充电桩的方式,可以让机器人更加智能
在使用区域内有靠墙插座
左右距离>60cm,桩前距离>100cm。参考图示:
插座位置不容易被人挪动(包括不小心踢到)
如果不满足以上条件,则使用线充+地面贴纸定位方式。
3.运行环境建图要求
雷达水平面视野角10m以内(推荐6m以内)有较多明显的标识物,应用场景尽量不要对称,减少地图中的局部相似性。
拥有较大实体面积,平面尽可能平整,不反光、不透光、不严重吸光。
雷达无法识别透明玻璃,反光玻璃和透明玻璃对机器人定位影响很大。
4.禁行线绘制要求
- 绘制禁行线:即绘制禁行区域,为了让机器人规划路线时,避开这些地方。
- 常见的几种需要绘制进行线的场景:无法识别的玻璃门、楼梯口等。
- 特殊注意:mini如果出现异常推动或者转动机器人,可能会造成机器人定位丢失,丢位丢失后,mini会出现盲走情况,盲走时如果未画禁行线容易出现摔机风险。
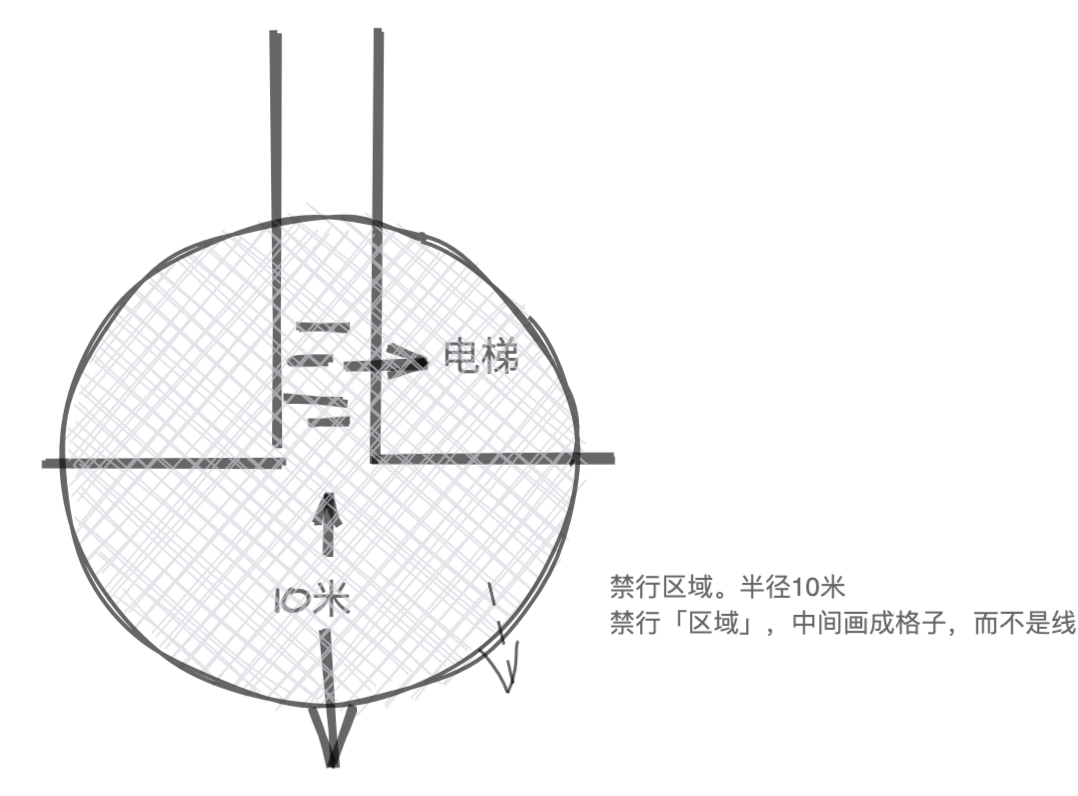
- 建议:当遇到地图内有商场扶梯或者楼梯间时,需要以商场扶梯或者楼梯间为圆心,画一个进行网格禁行区域(注意:是网格区域,不是线),圆的半径为机器端设置的定位丢失找回距离一致,分为5m、7m、10m。
- 举例:如果定位丢失走回距离为10米,则需要画的网格进行区域半径为10米,如图:
5.引领导航应避免的环境
- 机器人行进时存在超过10米的长廊
- 行进区域存在密集摆放的细椅子腿
- 人员密集区,比如:人满为患的医院急诊区
- 地图凹凸不平,类似板油路/石子路质感
- 路径中存在低于16.5cm的小型障碍物或存在门槛
- 运动过程中,障碍物突然高速、近距离的出现(出现位置距离机器人不足50cm)
- 有障碍物占用了机器人运动中必经之路
- 有障碍物占用了机器人的导航目标地点
- 行进路线存在“悬崖”状结构:如室内小水池
- 行进路线存在大量透明玻璃墙、玻璃房间等
- 行进路线存在纯黑色地面
- 行进路线存在大摩擦力的地毯,如较厚地毯
- 行进路线存在过于光滑地面,如大量涂油地坪漆
- 机器人在超空旷的环境(机器人距离其四周最近的障碍物超过15m),如礼堂舞台 等
常见问题可能原因及解决方案
1.定位漂移
- 可能原因
- 异常推动及转动机器人
- 解决方案
- 重启机器
2.定位丢失:
- 问题原因
- 切换地图后未进行重定位
- 导航出了地图外
- 解决方案
- 尝试手动将机器推回至充电桩的位置,定位成功后会界面展示或语音提示“定位成功”
- 原地重启后开机自动重定位(注意:重启过程中不要移动机器位置)
3.无法行走到某一地点
- 可能原因
- 机器定位丢失
- 机器周围有障碍物
- 目标点位置有障碍物
- 解决方案
- 检查机器定位情况
- 检查机器周围是否有障碍物
- 检查标点位置是否有障碍物
4.无法运动
- 可能原因
- 紧急停止按钮被按下
- 机器人轮子缠绕有异物
- 定位丢失
- 解决方案
- 紧急停止按钮被按下,请将紧急停止按钮悬起。
- 机器人轮子缠绕有异物,请关机后进行清理。
- 定位丢失,尝试手动将机器推回至充电桩的位置,定位成功后会界面展示或语音提示“定位成功”
5.导航速度设置
- 在机器人后台应用设置中,可对导航、引领等功能速度进行调控。